
자동차 번호판 인식 (OCR) with YOLO v2
물체인식 알고리즘중에서 yolo 를 이용한 방식을 정리합니다. (이론 x, 돌리는법 o)
순서는
- YOLO 소개
- dataset, 자동차 번호판
- annotation, label 만드는 작업
- darkflow, yolo for tensorflow
- training, 학습
- detection, test 하기
You Only Look Once
YOLO, object detection - 물체인식
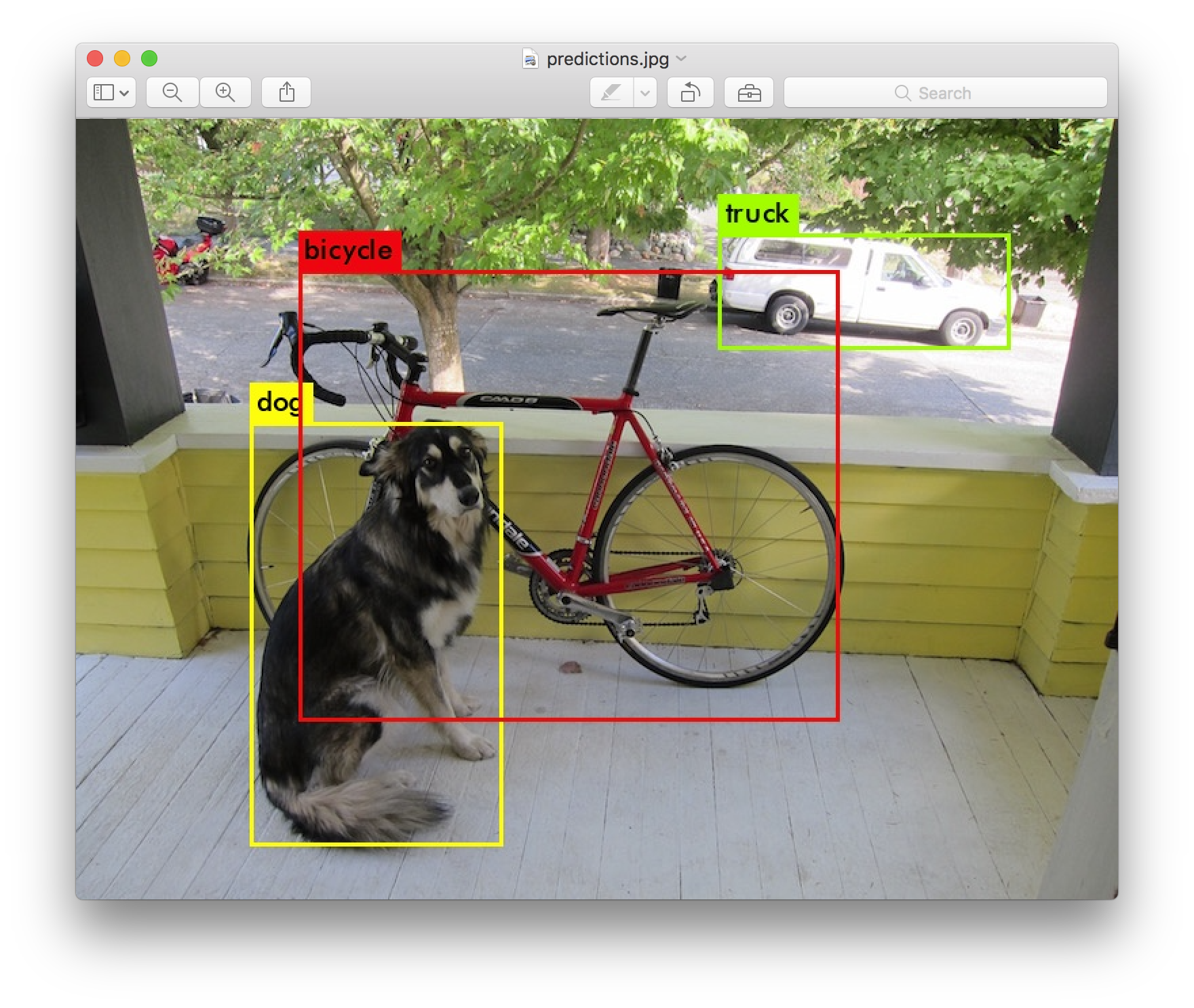
찾으려는 물체를 찾아 bounding box 로 표시해주는 알고리즘 입니다.
아래 사진은 YOLO 를 설명하는 대표적인 개, 자전거를 인식한 결과입니다.
YOLO 와 비슷한 선상에 있는 알고리즘으로는 Fast/Faster R-CNN 과 SSD 가 있는데 이것들과의 차이점으로는 다음과 같은 특징이 있습니다.
| 속도 : speed | 정학도 : accuracy |
|---|---|
YOLO > Fast/Faster R-CNN, SSD | Fast/Faster R-CNN, SSD > YOLO |
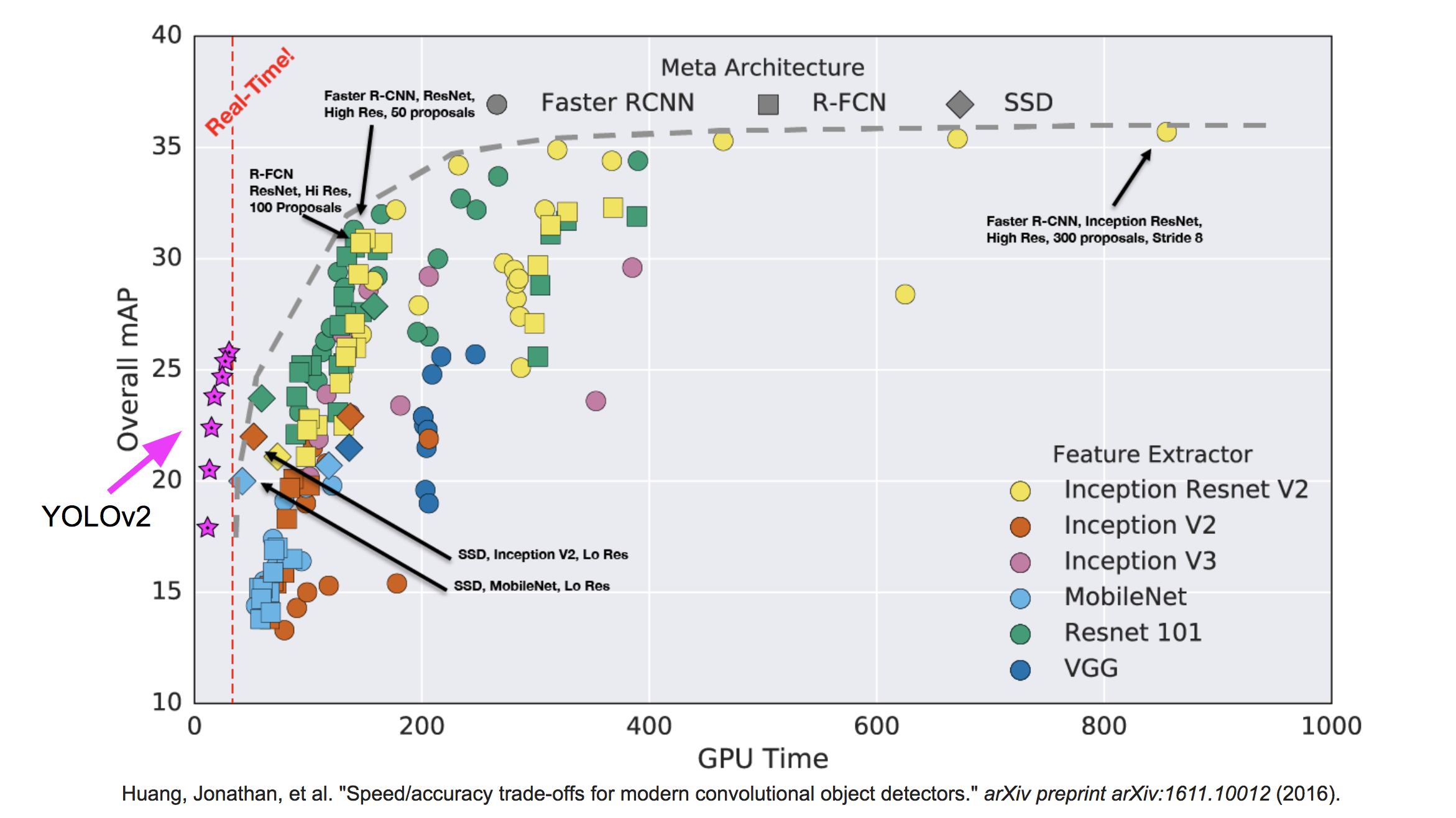
각자 필요에 맞게, 상황에 맞게 알고리즘을 가져다 쓰면 됩니다.
real-time (예를 들어, gpu 1장 기준 초당 30장 이상 처리要 : 30fps ) 을 해야하는 상황이면 YOLO 를 쓰면 되고
시간과 비용에 구애받지 않는다면, Faster R-CNN 을 쓰면 됩니다.
dataset
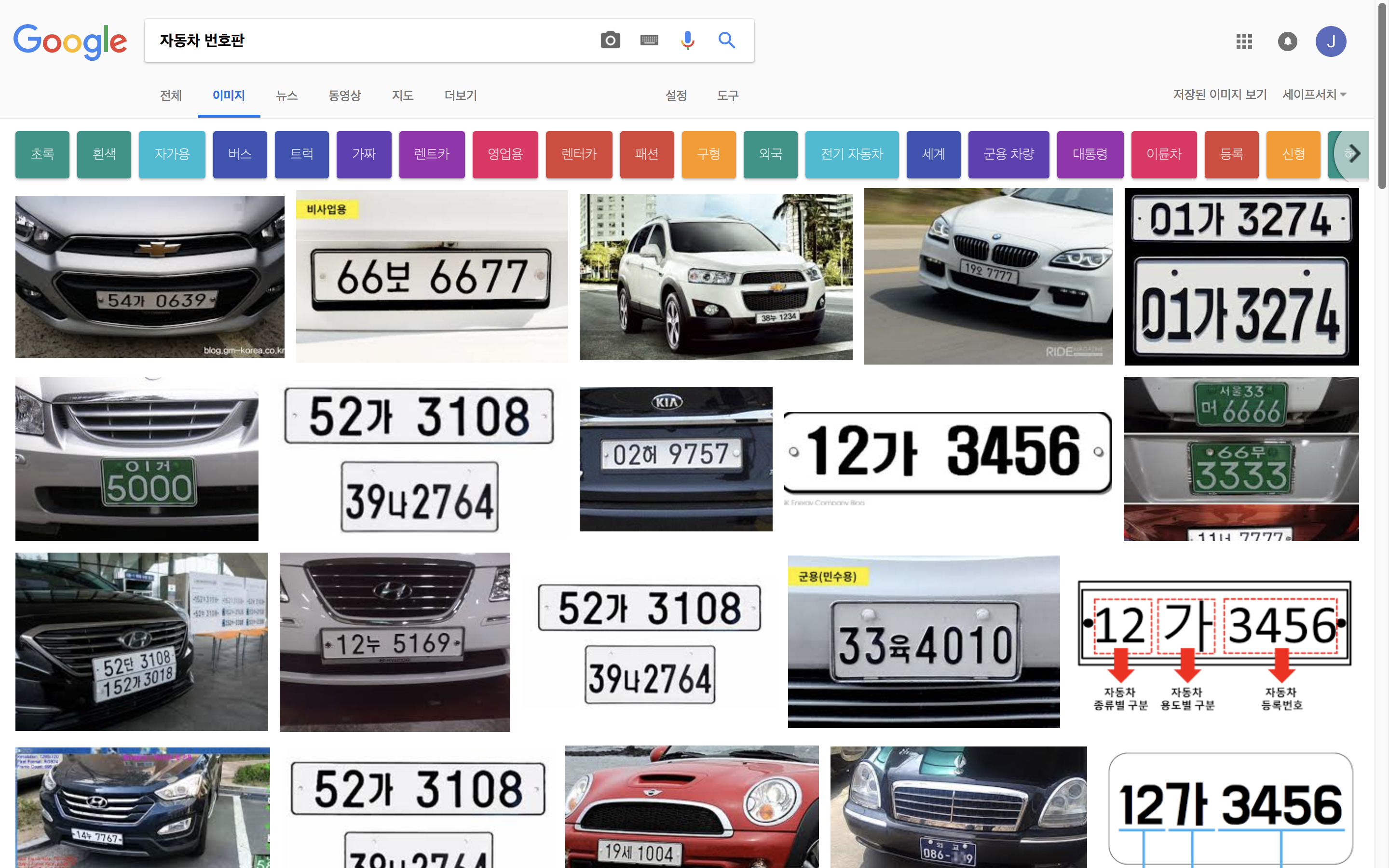
이번 포스트를 위해서 자동차 번호판 인식을 진행해보려 하는데, google 에 자동차 번호판 을 검색해서 나온 사진들을 이용하였습니다. (29장 구할 수 있었습니다.)

자동차 번호판은 [0-9]숫자와 [가-힣]한글의 조합으로 구성되어있습니다.
이번 포스트에서 인식한 클레스는 숫자 10종류와 한글 1종류로 제한하겠습니다.
숫자는 MNIST 처럼 얕은 네트워크도 0~9 를 잘 인식하지만, 한글은 종류가 너무 많아서 통으로 kr 이라는 class로 정의했습니다.
Annotation
Object detection 는 지도학습에 해당돼서 당연히 정답 데이터가 필요합니다.
여기서 정답데이터의 형태는 우리가 일반적으로 생각하는 [[1],[2],[3],[4], …] 이런 형태가 아니라 해당 오브젝트의 좌표값이 필요합니다.
(1024*1024 이미지에서 시작좌표:(300, 400) 와 끝좌표 : (500, 600) 이런식으로)
또한 구현된 여러 코드들을 살펴보면 xml 로 정답 데이터를 요구하는 경우가 대부분입니다.
이런 데이터셋을 만드려면 처음에는 바로 포기하거나 어떻게 해야하는 지 모를 것입니다.
여기서 annotation - xml 데이터를 만들어주는 중요한 프로그램이 있는데 바로 labelimg 입니다.
labelimg
git clone https://github.com/tzutalin/labelImg.git
cd labelImg-master
python labelImg.py
다음 코드를 통해서 labelImg를 실행시킵니다.
실행 조건에는 pyqt가 필요한데 아마 anconda를 통해 python을 사용하시는 분들이라면 아무 문제없이 작동될 것입니다.
- 이후 open 말고
opendir을 통해서 이미지가 들어있는 폴더를 선택해서 안에있는 이미지 전체를 불러옵니다. savedir을 통해서 annotation 정보가 담겨있는 xml 파일이 저장될 폴더를 선택합니다.- 열심히 노가다 합니다.
작업에 도움되는 단축키는 이거 3개면 충분합니다.
w를 눌러서 내가 원하는 물체를 감싸주고 label 정보를 입력해주는 작업을 반복합니다.
d를 눌러 다음 이미지로 넘어갑니다.
a를 눌러 이전 이미지로 돌어갑니다.
| 단축키 | 설명 |
|---|---|
w | Create a rect box |
d | Next image |
a | Previous image |

darkflow
darkflow 는 [darknet] 의 tnesorflow 버전입니다. (darknet은 YOLO를 C로 짠 오픈소스입니다.)
Darknet: Open Source Neural Networks in C
멋진 분들이 짜주신 오픈소스입니다.
우리는 감사히 사용하고 GNU General Public License v3.0Liability, Warranty만 지켜주시면 됩니다.
아직 pip 등록된 패키지가 아니므로 git 으로 설치해야합니다.
git clone https://github.com/thtrieu/darkflow.git
cd darkflow
python setup.py build_ext --inplace
pip install .
이제 터미널에서 flow 라는 명령어로 yolo v1 과 yolo v2 를 사용할 수 있습니다.
현재 공식적으로 yolo v3가 나온 상황이지만 darknet 에서만 지원되고 darkflow 에서는 사용할 수 없습니다. Issues #665
클론한 darkflow에는 이미 네트워크를 구성해 놓았는데,
| cfg | 설명 |
|---|---|
yolo.cfg | 가장 베이직한 모델, VGG 기반 수정버전 |
tiny-yolo.cfg | 말 그대로 가벼운 모델, AlexNet 기반 수정버전 |
~~coco.cfg | coco data set 에 맞춰서 네트워크 변경 |
~~voc.cfg | voc data set 에 맞춰서 네트워크 변경 |
이번 포스트에서는 yolo.cfg 를 사용할 것이다. 아래는 네트워크 구조
| Source | Train? | Layer description | Output size |
|---|---|---|---|
| input | (?, 608, 608, 3) | ||
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 608, 608, 32) |
| Load | Yep! | maxp 2x2p0_2 | (?, 304, 304, 32) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 304, 304, 64) |
| Load | Yep! | maxp 2x2p0_2 | (?, 152, 152, 64) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 152, 152, 128) |
| Init | Yep! | conv 1x1p0_1 +bnorm leaky | (?, 152, 152, 64) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 152, 152, 128) |
| Load | Yep! | maxp 2x2p0_2 | (?, 76, 76, 128) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 76, 76, 256) |
| Init | Yep! | conv 1x1p0_1 +bnorm leaky | (?, 76, 76, 128) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 76, 76, 256) |
| Load | Yep! | maxp 2x2p0_2 | (?, 38, 38, 256) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 38, 38, 512) |
| Init | Yep! | conv 1x1p0_1 +bnorm leaky | (?, 38, 38, 256) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 38, 38, 512) |
| Init | Yep! | conv 1x1p0_1 +bnorm leaky | (?, 38, 38, 256) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 38, 38, 512) |
| Load | Yep! | maxp 2x2p0_2 | (?, 19, 19, 512) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 19, 19, 1024) |
| Init | Yep! | conv 1x1p0_1 +bnorm leaky | (?, 19, 19, 512) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 19, 19, 1024) |
| Init | Yep! | conv 1x1p0_1 +bnorm leaky | (?, 19, 19, 512) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 19, 19, 1024) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 19, 19, 1024) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 19, 19, 1024) |
| Load | Yep! | concat [16] | (?, 38, 38, 512) |
| Init | Yep! | conv 1x1p0_1 +bnorm leaky | (?, 38, 38, 64) |
| Load | Yep! | local flatten 2x2 | (?, 19, 19, 256) |
| Load | Yep! | concat [27, 24] | (?, 19, 19, 1280) |
| Init | Yep! | conv 3x3p1_1 +bnorm leaky | (?, 19, 19, 1024) |
| Init | Yep! | conv 1x1p0_1 linear | (?, 19, 19, 80) |
사실 coco 나 voc 데이터 셋을 사용하는게 아니라 자신의 데이터 셋을 사용하는 것이라면,
2가지 정도 수정할 사항이 있다.
1. labels.txt 수정하기
./labels.txt 을 위에서 labelimg에서 만들때 썼던 classes 이름으로 수정해 준다.
0
1
2
3
4
5
6
7
8
9
kr
2. .cfg 수정하기
사용할 yolo.cfg 를 복사해서 다른이름으로 저장하고
(ex. car-yolo.cfg : 왜냐하면 그 이름 그대로 쓰면 안에 로직으로 인해 coco label로 인식해버린다. labels.txt 소용이 없어짐)
[region]classes 를 11로 바꾼다.- 그 위
[convolutional]filters 값을 (num + classes) * 5 로 바꿔준다. 여기서는(5 + 11) * 5 = 80- anchors 는 2개가 1세트이다. 즉 10개 아니다. 표현방법이 이상할 뿐…
[convolutional]
size=1
stride=1
pad=1
filters=80 # 수정!
activation=linear
[region]
anchors = 0.57273, 0.677385, 1.87446, 2.06253, 3.33843, 5.47434, 7.88282, 3.52778, 9.77052, 9.16828
bias_match=1
classes=11 # 수정!
coords=4
num=5
softmax=1
jitter=.3
rescore=1
flow –help : parameters
Example usage: flow --imgdir sample_img/ --model cfg/yolo.cfg --load bin/yolo.weights
Arguments:
--help, --h, -h show this super helpful message and exit
--imgdir path to testing directory with images
--binary path to .weights directory
--config path to .cfg directory
--dataset path to dataset directory
--labels path to labels file
--backup path to backup folder
--summary path to TensorBoard summaries directory
--annotation path to annotation directory
--threshold detection threshold
--model configuration of choice
--trainer training algorithm
--momentum applicable for rmsprop and momentum optimizers
--verbalise say out loud while building graph
--train train the whole net
--load how to initialize the net? Either from .weights or a checkpoint, or even from scratch
--savepb save net and weight to a .pb file
--gpu how much gpu (from 0.0 to 1.0)
--gpuName GPU device name
--lr learning rate
--keep Number of most recent training results to save
--batch batch size
--epoch number of epoch
--save save checkpoint every ? training examples
--demo demo on webcam
--queue process demo in batch
--json Outputs bounding box information in json format.
--saveVideo Records video from input video or camera
--pbLoad path to .pb protobuf file (metaLoad must also be specified)
--metaLoad path to .meta file generated during --savepb that corresponds to .pb file
Training
../data/dataset/경로에 바로 이미지를 넣고 (.png, .jpg)../data/annotations/ \경로에 바로 annotation 데이터를 넣습니다. (.xml)- trainer 는 기본
rmsprop이지만Adam으로 바꿔줬다. - 개인취향 - 그리고 학습할 때는 꼭
--train을 해야 합니다. - –load 는 맨 처음 학습할 때는 없애고, 재학습 할 때만
-1or특정 epoch 숫자를 넣습니다.- .weights 파일을 보실 수 있는데 전혀 쓸일이 없습니다. 왜냐하면, coco 나 voc 데이터이기 때문입니다.
- 우리는 ckpt 를 쓰거나 pb 로 저장해서 씁니다.
- 나머지는
parameters를 참조.
flow \
--model ./cfg/car-yolo.cfg \
--labels ./labels.txt \
--trainer adam \
--load -1 \
--dataset ../data/dataset/ \
--annotation ../data/annotations/ \
--train \
--summary ./logs \
--batch 5 \
--epoch 100 \
--save 50 \
--keep 5 \
--lr 1e-04 \
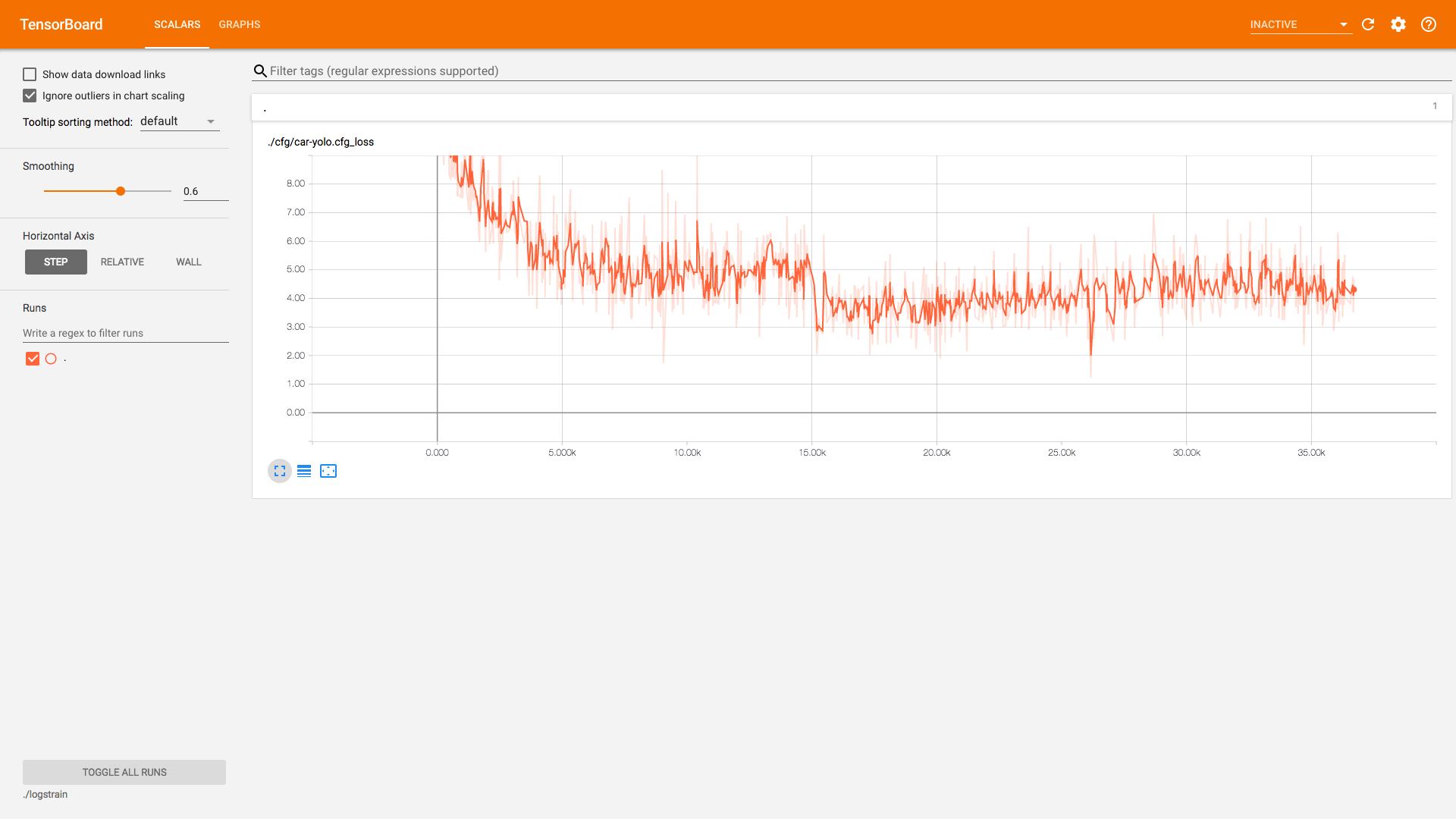
여기서 조금 특이한 점은 logs 로 summary 했는데 logstrain 에 저장됩니다.
logs는 빈 폴더가 됩니다.
tensorboard --logdir=./logstrain
detect
학습이 끝나면 detection 을 진행합니다.
--dataset 이 아니라 --imgdir 에 찾고싶은 데이터를 입력합니다.
그러면 test할 이미지 폴더 안에 out 폴더가 생기고 디텍션한 결과가 저장됩니다.
flow \
--imgdir ../data/dataset/ \
--model ./cfg/car-yolo.cfg \
--load -1 \
--batch 1 \
--threshold 0.5 \
학습 데이터도 29장밖에 없었고 분류할 classes가 11개나 되는 이러한 환경에서
포스트하기위해 적당히 돌린 결과는 다음과 같다.
| 엉망 | 진창 |
|---|---|
 | 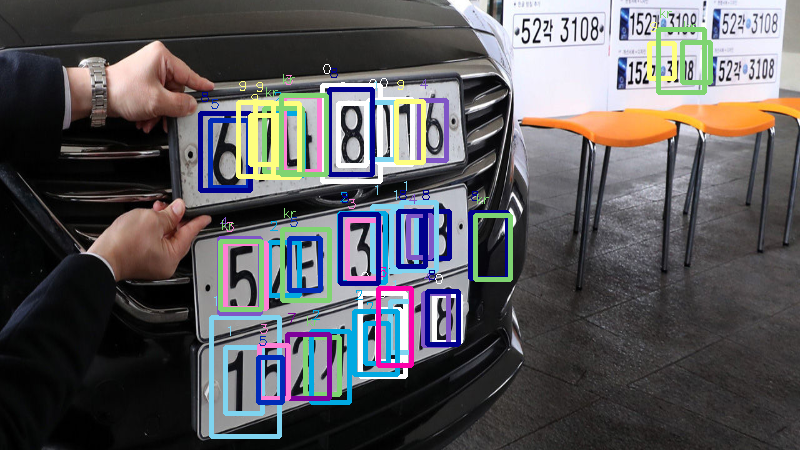 |
 | 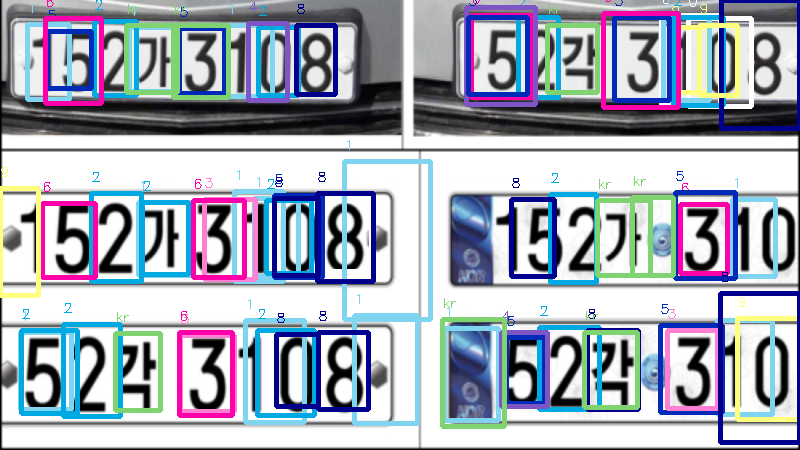 |
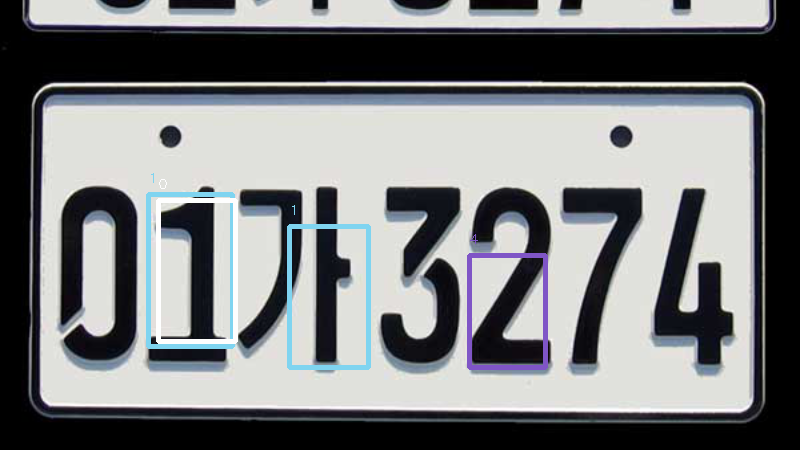 |  |
마무리
YOLO 를 돌려보고 싶은 마음에 google 을 해봤지만 죄다 이론설명..
darkflow 깃헙 페이지를 가도 충분하지는 않다.
그래서 만들게 됐다.
Reference
| name | url |
|---|---|
| YOLO | https://pjreddie.com/darknet/yolo/ |
| labelimg | https://github.com/tzutalin/labelImg |
| darkflow | https://github.com/thtrieu/darkflow |
| darknet | https://pjreddie.com/darknet/ |
| issues/665 | https://github.com/thtrieu/darkflow/issues/665 |